| CONCEPT OF HOMOGENEITY FOR STRAIN
ANALYSIS
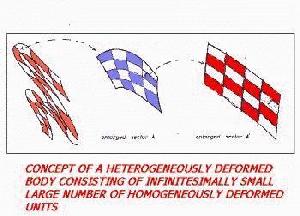
The continuum mechanics implies that one point has only one final position in the deformed state. Besides, any point x,y lying next to a point such as x1,y1 will have the same relative positions with its final counterpart in the deformed state. If a point x,y, however, lies on a plane of discontinuity which is active during
the deformation such as a glide plane gp, it will have two positions in the deformed state such as x',y' and x",y". As the body is heterogeneously deformed, it can be split into smaller and smaller fragments until a point is obtained at which the deformation can be considered to be statistically homogeneous. The finite strains for such small points are then integrated to obtain the strain for the entire body. This is schematically explained in the bottom right figure. Click here to see another example of this which shows a tightly folded stratal sequence of which a small part (the deformed grid) is enlarged in the centre and then again a small part of it is enlarged to the right hand side which has a shape close to a parallelogram. The initial layer was implanted with a rectangular grid. After buckling (left ), the individual grids were deformed heterogeneously. One of these grids enlarged is shown in the centre and the initial grid on smaller scale in this too was deformed but the shapes are close to rectangles, trapeziums or parallelograms, One of the grids from the central part is enlarged and shown to the right. In this, the deformed grids all have nearly similar shapes. The basic assumption in this technique for integrating finite strains is that if you break down a large heterogeneously deformed body into smaller and smaller units, it may be possible to arrive at a stage when the strain can be considered to be statistically homogeneous and subjected to analytical procedures as there is practically no way to analyse shapes which are not really geometric. |